PID
위치제어
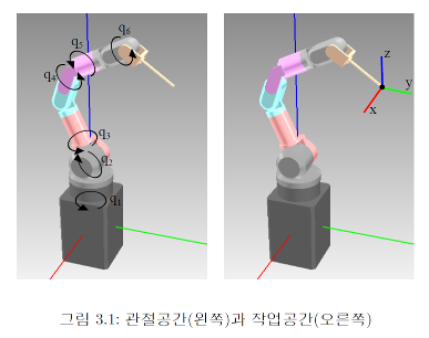
로봇 매니퓰레이터는 끝단을 통해서 작업을 합니다. 이렇게 끝단을 작업하려면 당연히 로봇을 구성하는 각 관절을 움직여야 하므로, 관절공간과 작업공간에서 각각 제어하는 방법이 필요합니다. 관절공간에서의 위치 제어는 로봇 끝단의 위치를 제어하기 위해 필요한 관절의 목표 위치를 계산한 후, 해당 위치로 관절이 이동할 수 있게 하는 것입니다. 이 경우, 작업공간 위치제어 전에 관절공간 위치제어기를 먼저 거치게 됩니다. 작업공간에서의 위치제어는 직접적으로 로봇의 끝단을 제어하기 위한 토크를 각 관절에 적용하는 방식으로 진행됩니다. 로봇 끝단을 이용한 작업은 크게 자유공간작업과 접촉작업으로 분류될 수 있습니다. 자유공간작업: 물체를 어떤 위치에서 다른 위치로 옮기는 것과 같이 환경과의 접촉이 없는 작업 접촉작업: 로..