기구학
동역학 - 뉴턴 오일러 운동방정식 3
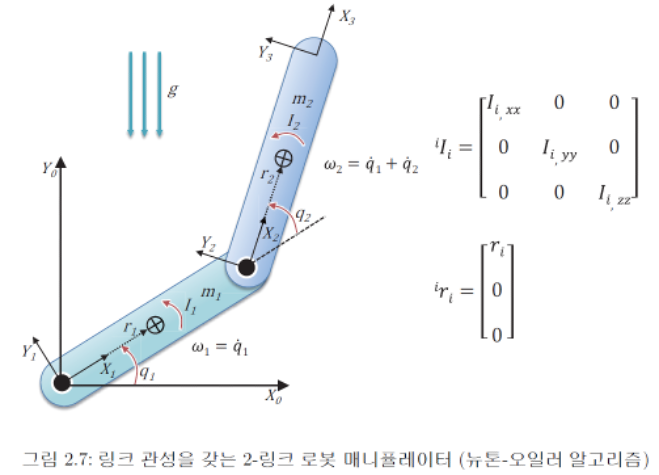
동역학 - 뉴턴 오일러 운동방정식 3 지금까지 알아본, 각 링크의 관절에 설정된 좌표계들 사이의 좌표변환 관계를 고려한 뉴턴-오일러 동역학 알고리즘은 다음과 같습니다. 1. 매니퓰레이터의 글로벌(0번째) 기준 좌표계에 대한 초기 조건을 설정한다. * 초기 직진가속도를 위와 같이 설정함에 따라 중력가속도는 모든 링크들에 자연스럽게 적용됩니다. 2. 부터 까지 전진 순차를 적용합니다. 3. 매니퓰레이터의 끝단의 힘/모멘트에 관한 말단 조건을 가지고 부터 까지 후진 역차를 적용합니다. 4. 번째 관절에서의 힘/토크는 구동기 특성을 고려하여 다음과 같이 결정됩니다. 이제 2링크 매니퓰레이터의 동역학 모델에 적용해보겠습니다. 다음 그림과 같은 매니퓰레이터 시스템에 적용하기..

기구학 - 여유자유도(Redundancy)
여유자유도(Redundancy) 여자유도는 매니퓰레이터에서, 필요한 위치와 방향각을 조정하기 위한 최소한의 자유도 보다 관절의 수가 많은 경우를 의미합니다. 즉, 출력보다 입력의 차원이 더 높은 경우입니다. 그리고 자코비안 행렬에서 열의 수가 행의 수보다 많을 때(가로로 넓게 생긴...)인 것이죠. 이럴 경우에 매니퓰레이터는 작업을 수행하면서 동시에 장애물을 회피할 수도 있고, 여러 개의 작업 조건(or 구속 조건이라 하는...)을 만족하면서 작업을 수행할 수도 있습니다. 다음은 Boston Dynmaics의 Stretch입니다. 0:46 부터 46초 부터 보시면 소위 null space control의 대표적인 모션을 보실 수가 있습니다. 매니퓰레이터가 여자유도일 경우, 다음과 같이 표현됩니다. $\m..

기구학 - Velocity Kinematics
속도 기구학 (Velocity Kinematics) 속도 수준에서 관절 공간과 작업 공간의 관계를 표현합니다. 사실 kinematics/inverse kinematics 는 비선형 관계입니다. Forward kinematics는 task space로의 해가 나오지만, 그 역은 exact한 해가 결정되지 않기 때문입니다. 따라서 선형 관계가 성립하는 미소 움직임에서의 표현 방법()을 알아야 합니다. 자코비안 (Jacobian) 차원 벡터 가 차원 벡터 의 함수로 정의 된다고 할 때, Jacobian은 다음과 같이 정의 할 수 있다. 이와 같이 매니퓰레이터의..

기구학 - Kinematics
기구학 (Kinematics) 로봇 매니퓰레이터의 관절 ()와 말단 위치 ()의 관계는 다음과 같이 비선형 관계식 형태로 나타낼 수 있습니다. Denavit-Hartenberg (DH) Parameter를 이용하여 두 링크 간의 좌표 표현이 가능합니다. 유튜브에서 DH parameter에 대한 좋은 영상이 있습니다(link). 본 영상을 참고하시면 직관적으로 이해 되기 편할 것 같습니다. 식 (1.61)에서 는 축 방향으로 만큼 선형 이동, 은 축 방향으로 만큼 회전 이동을 한 것이라는 의미 입니다. 이를 수학적으로 표현하면, 이와 같이 식 (1.61)을 동차변환으로도 표현이 가능합니다. 더보기 아래 이미지는 DH parameter를 이용한 $..