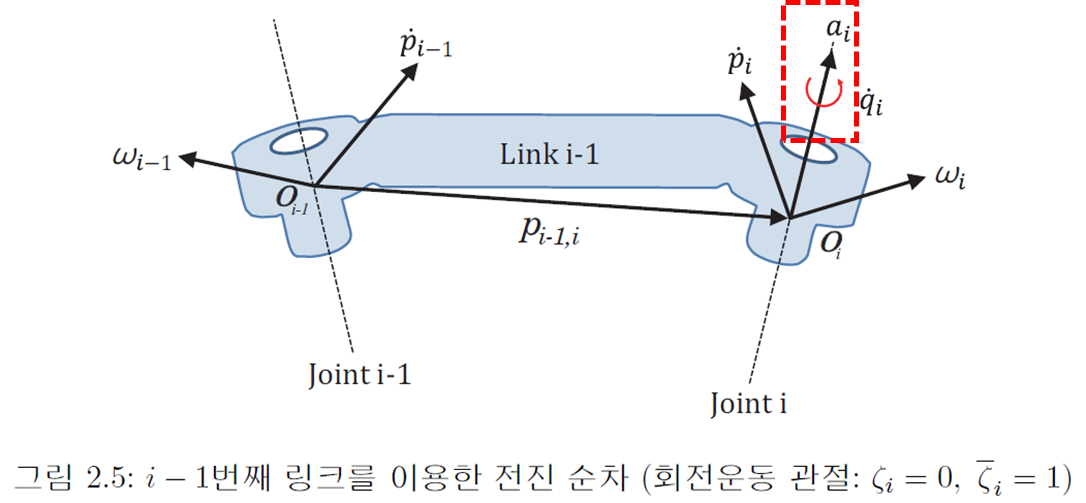
전진 순차는 링크 1n까지 전진하면서 모든 링크에 부착된 좌표계 원점들의 직진 속도, 회전 속도 그리고 직진 가속도, 회전 가속도를 순차적으로 계산하는 것입니다.
후진 역차는 뉴턴 운동방정식을 적용하여 힘과 직진운동 사이의 관계식을 유도하고, 오일러의 회전 운동방정식을 적용하여 모멘트와 회전운동 사이의 관계식을 얻는 것입니다.
후진 역차는 전진 순차를 통해 얻은 모든 기구학 정보들(속도/가속도)을 활용하고, 로봇 말단에 인가되는 힘/모멘트 정도를 말단 조건으로 하여 i=n번 좌표계 원점의 힘/모멘트 정보를 얻고, 이를 기반으로 i=n−1번 좌표계의 힘/모멘트를 구하고, 또 이를 이용하여 i=n−2,i=n−3,...,i=1좌표계의 힘/모멘트까지 얻는 과정입니다.
i번째 링크 무게 중심에서 직진속도는, 전진 순차에서 얻은 i번째 좌표계 원점의 직진속도를 활용하여 얻을 수 있습니다.
그리고, i번째 링크 무게중심의 직진 가속도는 직진속도를 시간에 대해 미분을 하여 유도할 수 있습니다.
뉴턴 2법칙을 적용하면 다음과 같은 힘의 균형 방정식을 얻을 수 있습니다.
* 외력(F)=관성(m)⋅가속도(a)
이때 식 (2.33)에서 −fi+1은 i+1번째 링크에서 i 번째 링크에 전달해 주는 반작용 힘벡터를 나타내는 것입니다.
식 (2.32)를 식 (2.33)에 적용한 후 정리하면, i번째 링크의 직진 운동방정식이 다음과 같이 얻어집니다.
식 (2.34)에서 중력(mi^g)에 의한 효과가 사라지는 이유는 전진 순차에서 초기 가속도로 중력가속도 벡터를 선정함에 의해 자동적으로 포함되기 때문입니다.
따라서 ¨p0=−^g로 취급하여 모든 링크에 중력의 효과를 부여할 수 있게 됩니다.
다시 i번째 링크의 무게중심을 기준으로 작용하는 모든 모멘트를 계산하고 이들의 합으로 모멘트 균형 방정식을 얻을 수 있습니다.