Robot Theory
동역학 - 뉴턴 오일러 운동방정식 3
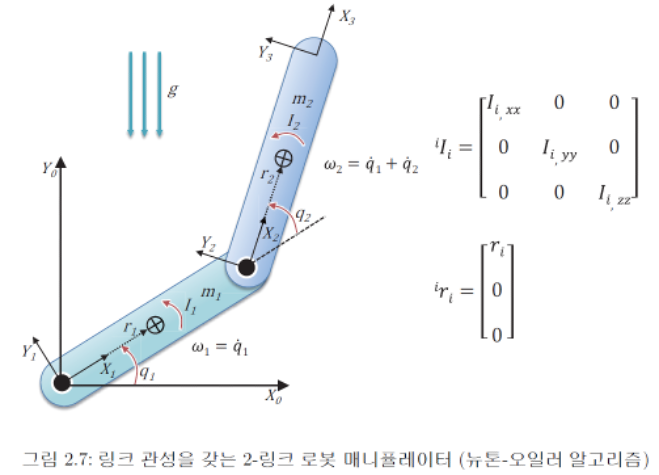
동역학 - 뉴턴 오일러 운동방정식 3 지금까지 알아본, 각 링크의 관절에 설정된 좌표계들 사이의 좌표변환 관계를 고려한 뉴턴-오일러 동역학 알고리즘은 다음과 같습니다. 1. 매니퓰레이터의 글로벌(0번째) 기준 좌표계에 대한 초기 조건을 설정한다. * 초기 직진가속도를 위와 같이 설정함에 따라 중력가속도는 모든 링크들에 자연스럽게 적용됩니다. 2. 부터 까지 전진 순차를 적용합니다. 3. 매니퓰레이터의 끝단의 힘/모멘트에 관한 말단 조건을 가지고 부터 까지 후진 역차를 적용합니다. 4. 번째 관절에서의 힘/토크는 구동기 특성을 고려하여 다음과 같이 결정됩니다. 이제 2링크 매니퓰레이터의 동역학 모델에 적용해보겠습니다. 다음 그림과 같은 매니퓰레이터 시스템에 적용하기..

동역학 - 뉴턴 오일러 운동방정식 2
동역학 - 뉴턴 오일러 운동방정식 2 전진 순차 우선 전진 순차에 대해서 알아보도록 합시다. global 좌표계를 기준으로 할 때, 0번 좌표계를 원점으로 하고 초기 속도/가속도 정보를 가지고 링크 1부터 링크 까지 전진하면서 모든 링크에 부착된 각 좌표계 원점들의 속도와 가속도를 순차적으로 계산하는 것입니다. 일단 다음 그림과 같이 하나의 링크를 세우고, 일반화하여 따져봅니다. 위 그림과 같이 번째 링크의 앞/뒤 관절에 붙어 있는 번째 좌표계 원점을 로, 번째 좌표계 원점을 라고 표시합니다. 그러면 번째 좌표계 원점의 직진속도 및 회전속도는 다음 수식과 같이 표현됩니다. 찬찬히 살펴보자면, 번째 좌표계 원점의 직진속도와 회전속도 + $..

동역학 - 뉴턴 오일러 운동방정식 1
동역학 - 뉴턴 오일러 운동방정식 들어가기 라그랑주 운동방정식은 해석적으로 사용할 수 있다는 장점이 있지만, 미분 연산을 요구하므로 3자유도 이상의 다관절 로봇 매니퓰레이터의 경우에는 적용하기 까다롭다는 단점이 있습니다. 그러나 뉴턴-오일러 운동방정식은 미분연산을 요구하지 않으면서 대수학만으로 로봇 동역학 모델을 얻을 수 있습니다. 물론 뉴턴-오일러 운동방정식으로도 해석적인 형태의 로봇 동역학 모델을 얻을 수 있지만, 이를 위한 목적보다는 6자유도 등과 같은 다자유도 로봇의 동역학 모델을 수치적으로 얻을 때 주로 이용됩니다. 이러한 방법은 '전진 순차', '후진 역차' 방법으로 힘/모멘트를 계산하는 방식으로 구성됩니다. 이상입니다. * 본 글은 "실험로보틱스 교재 I(매니퓰래이션 및 비젼), 한국로봇학회..

C(q, /dot{q})과 크리스토펠 심볼 식 활용
동역학 - Appendix 코리올리 및 구심력 벡터로부터 행렬 와 속도벡터 을 분리하는 방법이 무수히 많은데, 여기서는 크리스토펠 심볼 식을 이용하여 의 유일한 형태를 찾는 방법에 대해서 설명하고 있습니다(이전 포스팅). 식 (2.22)의 행렬요소별 에 대한 의존성을 확인해 보면 를 확인할 수 있으며, 는 관절 변수에 대한 의존성 없이 상수임을 알 수 있습니다. * 이므로, 만 상수 취급 가능함 이를 활용하면 다음과 같이 에 대한 유일해를 찾을 수 있습니다. 이상입니다. * 본..